访问ros的5000端口,就在ip firewall address-list增加一个IP,实现重新拨号切换IP
访问ros的5000端口,就在ip firewall address-list增加一个IP,实现重新拨号切换IP:global aaa [/ip firewall address-list find list="changeip"];:global k:global a1:global a2do {:foreach k in=$aaa do={:set a1 (([/ip firewall address-list get $k address] & 0.0.255.
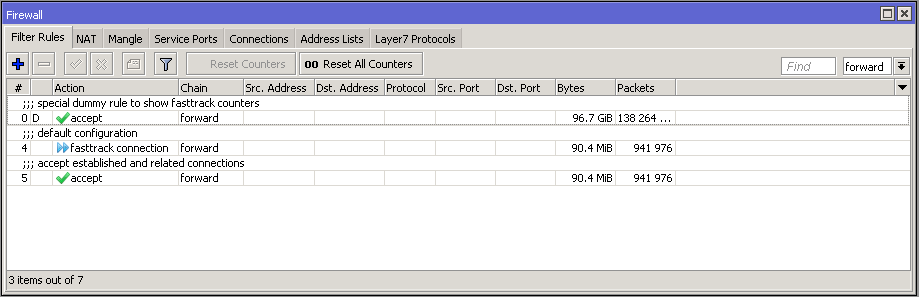
ROS的Fasttrack,可以极大的减少ROS的CPU使用率已经带宽!特别注意:如果开启了 fasttrack,simple queue 将失效。
原文:https://wiki.mikrotik.com/wiki/Manual:IP/Fasttrack特别注意:如果开启了 fasttrack,simple queue 将失效。需要两条命令来执行:/ip firewall filter add chain=forward action=fasttrack-connection connection-state=established,related/ip firewa
Ros之BGP学习87-88课
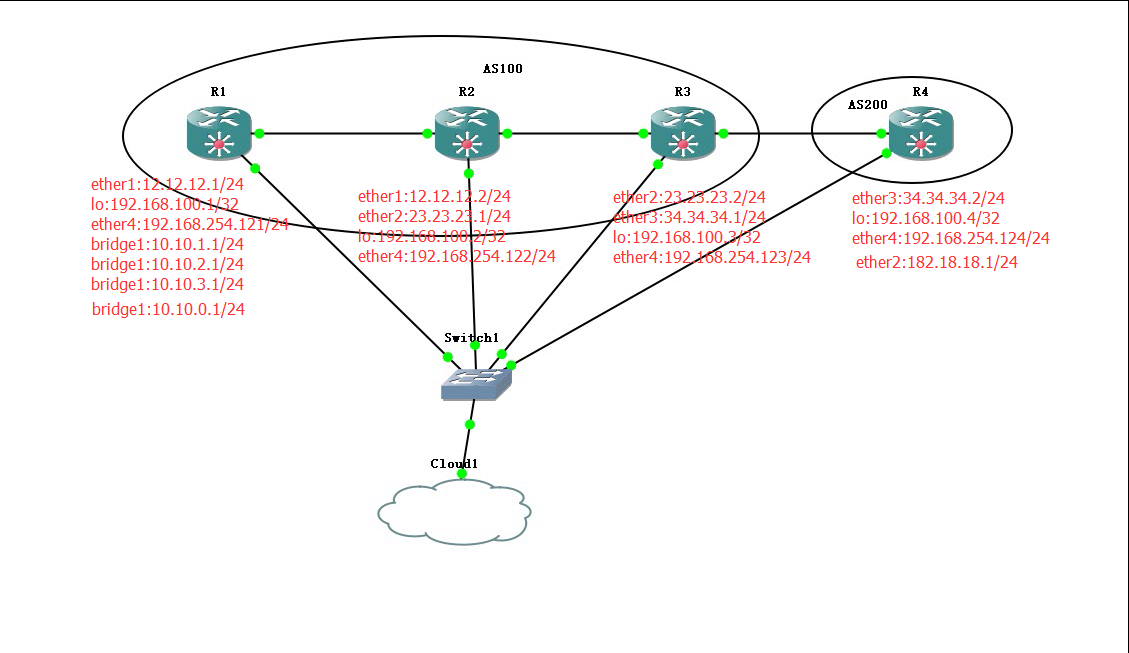
一些心得体会bgp network和Advertisements区别和联系宣告network和通告Advertisements的需别和联系,bgp引入路由有两种方法,一种是宣告network,一种是重发布Redistribute静态,ospf,rip等等。它这个跟ospf的宣告network不同,它的作用是把自己路由表里已经有的路由表,搬运进BGP的route路由表ip route print where bgp里,然后加工,比如进行汇总Aggregates,最后再通告Advertisement
ROS 6.X目前限速比较稳定的一个脚本
/ip firewall mangleadd action=mark-connection chain=forward in-interface=pppoe-out1 new-connection-mark=dconn-isp comment="ISP DOWNSTEAM"add action=mark-packet chain=forward connect
公司的一个ros需求创建10个ssid,走10根pptp线路,同时更换mac
红色的部分,是你要创建10个ssid的编号。从1到10一共10个。顺序不能变。foreach y in={[/interface wireless find where interface-type=virtual]} do={/interface wireless remove $y};foreach y in={[/ip address find address ~ "172.16"]} do={/ip address remove $y};foreach y in={[
DHCP客户端网关自动更新到静态路由TR069IP的网关
:local rmark "tr069ip":local count [ /ip route print count-only where comment="tr069ip"]if ($bound=1) do={:if ($count = 0) do={ /ip route add gateway=$"gateway-address" comment="tr069ip" routing-mark=$rmark&nbs
自动将拔进来的IP地址更改以客户端的地址。
:global localip [/interface l2tp-server get l2tp-in1 client-address ]:global oldip [/interface l2tp-client get l2tp-out3 connect-to ]:if ($localip != $oldip) do={/interface l2tp-clientset connect-to=$localip numbers=2:log warning "l2tp add
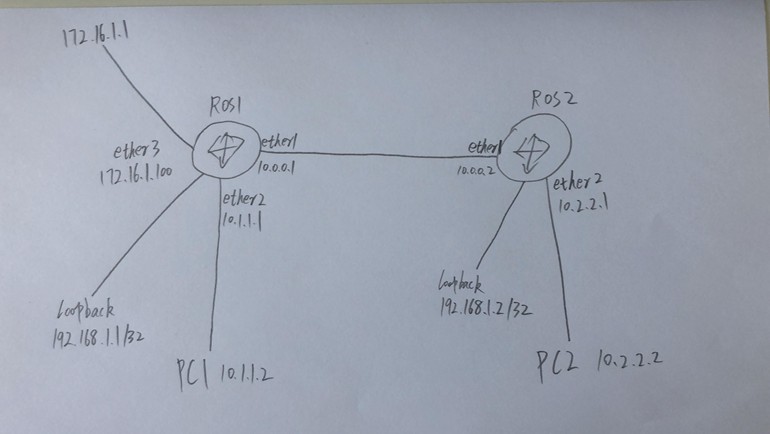
ROS配置OSPF及静态路由重分布实验
实验目的:1,两台ROS之间启用OSPF协议,宣告自身网段。2,重分布静态路由到OSPF中。下面是拓扑图:如图所见,有ROS1和ROS2两台路由器,均使用ether1接口互联,ROS1的IP地址是10.0.0.1,ROS2的地址是10.0.0.2。均使用ether2连接PC,ROS1的地址是10.1.1.1,ROS2的地址是10.2.2.1。连接ROS1的PC的IP是10.1.1.2,连接ROS2的PC的IP是10.2.2.2。出口在ROS1的ether3接口,该接口IP是172.16.1.10
疫情即将过去。
经过几个月的抗疫,终于降成2级响应了。新冠肺炎终于要过去了。
ROS和H3C,华为的端口汇聚方式
对端的华为用二层或者三层汇聚都可以模式选择lacp

搜索
最新留言
- 大佬这个适用于四口软路由吗?pve + ros
- 17C0PDN616301 00113285AF5C 00113285AF5D17C0PDN617401 00113285AF5E 00113285AF5F17C0PDN618501 00113285AF61 00113285AF6217C0PDN619601 00113285AF63 00113285AF6417C0PDN620701 00113285AF65 00113285AF6617C0PDN621801 00113285AF67 00113285AF68
- 黑群晖SN:17C0PDN618603MAC1:00113285AF3FMAC2:00113285AF40计算递增一组后的sn和mac对应就是SN:17C0PDN619703MAC1:00113285AF41MAC2:00113285AF42计算方式很简单,sn后2位不动 PDN后面的四位数字是变量数字。对应mac地址要同步计算,pdn后的四位数字每次递增或者递减11自然数,然后mac地址最后一位顺延递增或者递减1位。举例pdn后的数字是1000那么递增11就是1011,mac地址就是递增一位,比如原来的mac2地址是1那么,新的递增后的mac1地址就是2 mac2地址就是3 以此类推 自然数是0-9顺序,9之后是A-F 到F后循环到下一位0 ,循环后mac倒数第二位递增一位。递增数值范围也是一样, 我用别的白码测试自己算出来的sn十几组都可以 。这组sn我测试了一个可以正常使用。之前举例是递增计算方法,递减的计算方法就是sn回退11,mac回退1位
- 加个Q,一起玩。qq:892189
- 02-11-32-19-72-85
- DJF5D7QMFCD3B
- :local interfaceName [/interface get $interface name]:local newaddress $"local-address":local curaddress [ /ip firewall nat get [/ip firewall nat find comment=("SRC")] to-addresses ]:log info "intefaceName = $interfaceName, newadd = $newaddress, old = $curaddress":if ($curaddress != $newaddress) do={ /ip firewall nat set [ /ip firewall nat find out-interface=$interfaceName ] to-address=$newaddress}
- ArgentinaArmeniaArubaAustraliaAustriaAzerbaijanBahrainBarbadosBelarusBelgiumBelizeBoliviaBosnia and HerzegovinaBrazilBrunei DarussalamBulgariaCambodiaCanadaChileChinaColombiaCompliance TestCosta RicaCroatiaCyprusCzech RepublicDenmarkDominican RepublicEcuadorEgyptEl SalvadorEstoniaFinlandFranceGeorgiaGermanyGreeceGreenlandGrenadaGuamGuatemalaHaitiHondurasHong KongHungaryIcelandIndiaIndonesiaIraqIrelandIsraelItalyJamaicaJordanKenyaKorea RepublicKuwaitLatviaLebanonLiechtensteinLithuaniaLuxembourgMacauMacedoniaMalaysiaMaltaMexicoMonacoMoroccoNepalNetherlandsNetherlands AntillesNew ZealandNigeriaNorwayOmanPakistanPanamaPapua New GuineaPeruPhilippinesPolandPortugalPuerto Rico (U.S. territory)QatarRomaniaRussiaRwandaSaint BarthelemySaudi ArabiaSerbia and MontenegroSingaporeSlovakiaSloveniaSouth AfricaSpainSri LankaSwedenSwitzerlandTaiwanThailandTrinidad and TobagoTunisiaTurkeyUkraineUnited
- add as=65511 设置自已的。remote-as=65510添写对方的。 IP地址也一样,router-id=1.1.1.2 自己的。remote-address=1.1.1.1 对方的。
文章归档
- 2024年3月 (1)
- 2024年1月 (2)
- 2023年12月 (1)
- 2023年10月 (4)
- 2023年9月 (2)
- 2023年7月 (1)
- 2023年3月 (1)
- 2022年12月 (1)
- 2022年11月 (2)
- 2022年9月 (2)
- 2022年8月 (3)
- 2022年7月 (3)
- 2022年6月 (8)
- 2022年3月 (6)
- 2021年12月 (2)
- 2021年10月 (9)
- 2021年9月 (4)
- 2021年8月 (2)
- 2021年5月 (2)
- 2021年4月 (2)
- 2021年3月 (1)
- 2021年2月 (40)
- 2021年1月 (13)
- 2020年12月 (2)
- 2020年10月 (1)
- 2020年8月 (1)
- 2020年7月 (1)
- 2020年6月 (18)
- 2020年5月 (4)
- 2020年3月 (2)
- 2020年2月 (5)
- 2020年1月 (28)
- 2019年9月 (1)
- 2019年6月 (2)
- 2019年5月 (2)
- 2019年4月 (2)
- 2019年2月 (2)
- 2019年1月 (4)
- 2018年12月 (20)
- 2018年11月 (1)
- 2018年10月 (3)
- 2018年4月 (2)